Заставь машину думать: как развивают искусственный интеллект у роботов :: РБК Тренды
Робототехника долгое время развивалась отдельно от искусственного интеллекта (ИИ), но сейчас перспектив у автоматизации без него нет. Аналитики Сбербанка рассмотрели практику применения ИИ при создании роботов
Понятие искусственного интеллекта неразрывно связано с робототехникой. По сути, робот — машина, умеющая воспринимать окружающую действительность, ее интерпретировать и действовать соответствующим образом, то есть думать.
Появление терминов «робот» и «искусственный интеллект» сильно разнесено по времени (1921 и 1956 годы соответственно), а за последние полвека пути развития двух областей то сходились, то расходились. Но сейчас прогресс вычислительных мощностей, солидный объем практических наработок и доступность информации вынуждают эти дисциплины вновь объединиться, пишут аналитики Сбербанка в ежегодном обзоре рынка робототехники за 2019 год.
В определении авторов исследования ИИ — это способность программ и устройств интерпретировать данные, обучаться на них и использовать полученные знания для достижения целей, в том числе самостоятельно. В свою очередь ИИ делится на два типа:
- сильный ИИ — интеллект в широком смысле, способный решать задачи наравне с человеческим разумом;
- слабый ИИ занимается решением узкоспециальных задач, достигает конкретных поставленных целей.
Экономика инноваций
Три мифа о замещении человека роботами
Сегодня, пишут аналитики Сбербанка, сильного ИИ в природе пока не существует и вообще есть обоснованные сомнения в возможности его реализации. Поэтому искусственный интеллект сейчас и в ближайшем будущем — это слабый ИИ, занимающийся отдельными проблемами и задачами. Решить их помогает набор технологий, сгруппированный авторами доклада по пяти видам.
Технологии искусственного интеллекта
1. Компьютерное зрение
Компьютерное зрение
Это обработка визуальной информации для получения знаний. Базовая задача внутри этой технологии — детектирование объекта на изображениях и видео, то есть осознание того, что на одной фотографии в углу изображен автомобиль, а на другой — компьютер, клавиатура и телефон. В робототехнике результаты обнаружения объектов дают роботу понимание, что и как делать, а также способствуют его обучению.
Логическим продолжением детектирования является трекинг, то есть вначале объект обнаружен, затем начинается отслеживание его перемещений. Роботам это нужно, чтобы понимать визуальную сцену и учиться прогнозировать действия других объектов, что незаменимо, например, для беспилотных автомобилей.
Другие задачи компьютерного зрения — это сегментация изображения (понимание, где пол, где стена, а где дверь) и оценка глубины. Последнее подразумевает понимание расстояния до того или иного объекта и решается восстановлением трехмерной геометрии по серии двухмерных фотоснимков.
Экономика инноваций
Как роботы помогают сделать телепортацию реальной
2. Обработка естественного языка
Коммуникация с человеком невозможна без понимания его языка. Специалисты в области ИИ разбирают по частям отдельные морфемы, даже эмоциональный окрас слов в тексте, зашивая это в программу. Роботы нуждаются в таких технологиях, для них это как диалоговое окно с человеком, причем речь идет не просто о понимании, но и об ответной реакции и обучении новым понятиям.
3. Речевая аналитика
Если обработка языка касается текстовой информации, то речевая аналитика — звуковой. В первую очередь это распознавание речи, которое к 2019 году уже прочно вошло в быт людей. Следующий шаг — синтез речи, совершенствование голосовых качеств самого робота и/или программы до уровней человеческого общения.
4. Принятие решений
По-другому эту технологию можно назвать автоматизацией процессов, когда они проходят без участия человека. Поскольку опять же мы говорим о слабом ИИ, заточенном под решение отдельных задач, технологии принятия решений являются едва ли не самыми понятными по своему назначению. Авторы обзора выделяют несколько сфер применения таких технологий:
Поскольку опять же мы говорим о слабом ИИ, заточенном под решение отдельных задач, технологии принятия решений являются едва ли не самыми понятными по своему назначению. Авторы обзора выделяют несколько сфер применения таких технологий:
- навигация, например обход препятствий, запоминание и учет пройденного пути, локализация себя в пространстве;
- обучение путем демонстраций, когда робот заучивает показанные визуально или механически действия;
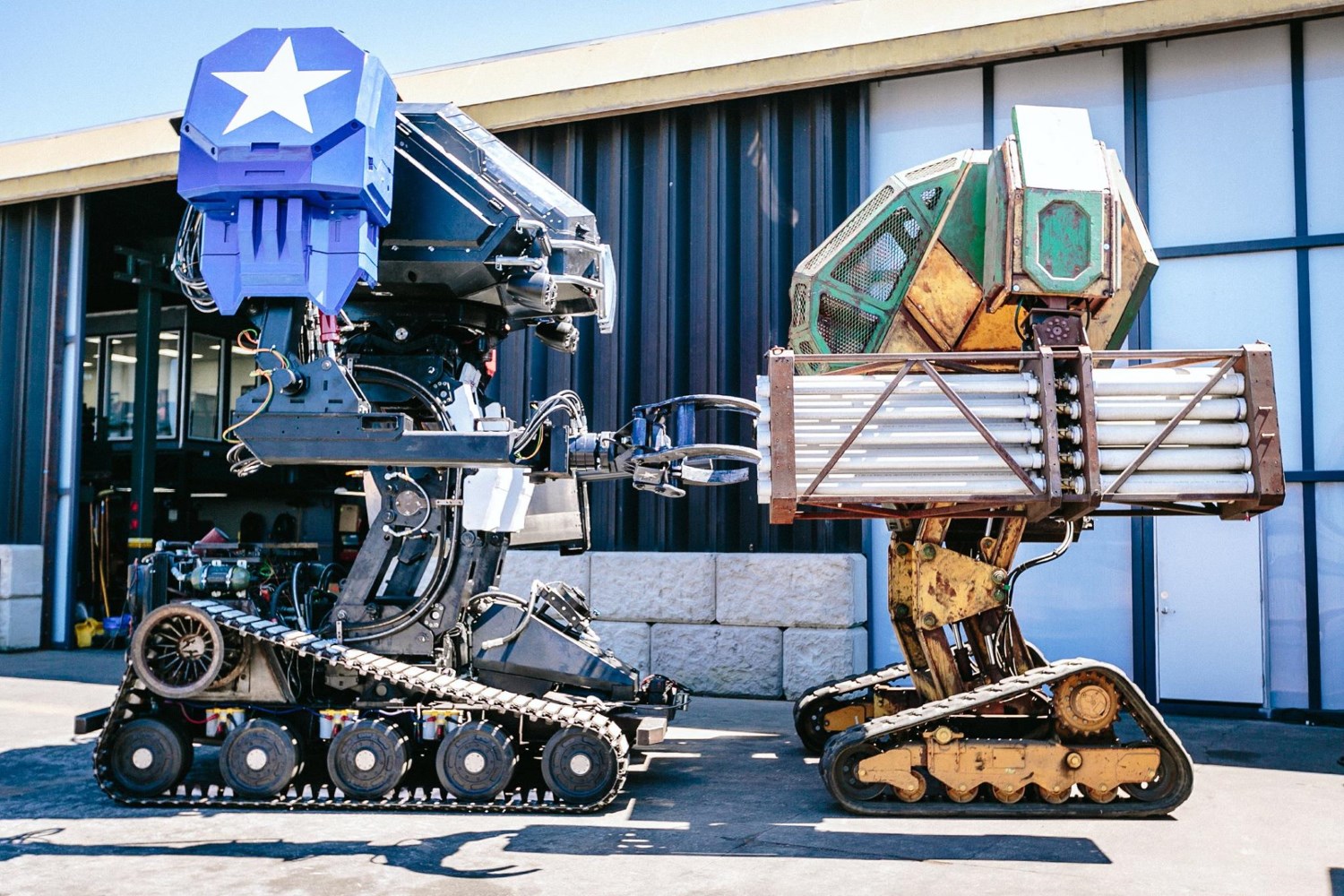
- эмоциональное взаимодействие, для которого машине нужно понимать настроение стоящего перед тобой человека, накладывать его на свои особенности «характера» и выдавать результат в виде «мимики» или «эмоций»;
- автоматизация машинного обучения, то есть снижение участия в нем человека, частичный перевод на самообучение.
Разумеется, такие технологии должны применяться совместно с другими: самостоятельная навигация вместе с компьютерным зрением, а эмоции — вместе с речевой аналитикой.
5. Рекомендательные системы
Рекомендательные системы
Отдаленно эта технология схожа с принятием решений, но аналитики Сбербанка выделили ее отдельным пунктом. Причина — потенциал широкого применения именно рекомендательных систем в сервисной робототехнике. Речь идет о предложении товаров и услуг, таргетированной рекламе, подборке кинофильмов и музыки. Применительно же к роботам технология может привести к распространению роботов-официантов или продавцов-консультантов.
Настоящее и будущее
Многие из указанных выше технологий уже применяются в робототехнике, причем не только в прототипах, но и в массовом производстве. Наибольший путь на данный момент пройден в областях компьютерного зрения и обработки естественного языка — другими словами, в распознавании визуальной и текстовой информации.
Уже сейчас существуют роботизированные системы, успешно применяющие те или иные наработки в области искусственного интеллекта. К самым известным аналитики Сбербанка относят три типа роботов:
- самоуправляемые автомобили.
 Пока это именно самоуправляемые, а не беспилотные транспортные средства. По закону водитель все равно необходим, хотя значительную работу по восприятию и оценке окружающей действительности проводит именно машина;
Пока это именно самоуправляемые, а не беспилотные транспортные средства. По закону водитель все равно необходим, хотя значительную работу по восприятию и оценке окружающей действительности проводит именно машина; - промышленные роботы. На производстве они применяются уже достаточно долго (например, высокоточные станки или манипуляторы для сборки машин), но технологии ИИ начали проникать сюда недавно, например машинное обучение роботов, призванных корректировать работу сервомоторов, или же использование компьютерного зрения для оценки того, как лучше упаковать продукт;
- кухонные роботы. Компьютерное зрение помогает им определить местонахождение ингредиентов и утвари и составить план приготовления блюда.
 Пока это именно самоуправляемые, а не беспилотные транспортные средства. По закону водитель все равно необходим, хотя значительную работу по восприятию и оценке окружающей действительности проводит именно машина;
Пока это именно самоуправляемые, а не беспилотные транспортные средства. По закону водитель все равно необходим, хотя значительную работу по восприятию и оценке окружающей действительности проводит именно машина;
Индустрия 4.0
Правовед Виктор Наумов — о законодательном регулировании робототехники
В будущем развитие робототехники будет происходить в первую очередь за счет более широкого и глубокого внедрения ИИ, а не совершенствования материально-технической базы, уверены авторы обзора. Перспективы развития рынка они разделяют на краткосрочные и долгосрочные, правда, конкретных дат не называют.
Перспективы развития рынка они разделяют на краткосрочные и долгосрочные, правда, конкретных дат не называют.
1. Краткосрочные инновации:
- захват объектов и манипуляция ими будут доведены до уровня действий человека;
- мобильность роботов, преодоление ими препятствий также сравняются по возможностям с человеческими умениями;
- разговор с роботом будет неотличим от разговора с человеком;
- затраты и время на программирование роботов будут сокращаться, что сделает их самих дешевле, а внедрение автоматизации — шире.
2. Долгосрочные инновации:
- по умолчанию каждый робот сможет решать любые задачи, присущие слабому (узкоспециальному) ИИ;
- в рамках решения своих задач роботы станут полностью автономными, тогда как выход за их пределы потребует вмешательства человека;
- непрерывный обмен информацией и какими-то удачными решениями между роботами ускорит процесс самообучения;
- роботы начнут не просто общаться, как люди, они смогут планировать поведение с учетом возможного эффекта на окружающих, по сути выработают социальный интеллект;
- благодаря технологиям ИИ роботы получат не просто базовые знания по определенному виду деятельности, но и станут считаться высококлассными специалистами, например в качестве продавцов или медсестер.
Робот-фотограф / робот-фотопромоутер
Люди любят себя, свои изображения, и поэтому обожают фотографироваться.
Благодаря этому свойству человеческой псхики любые фото услуги в местах массового скопления людей обречены на успех.
Мы не обошли стороной этот очевидный факт, научив фотографировать людей наших роботов, превратив их в фотопромоутеров.
В РЕЖИМЕ КЛАССИЧЕСКОГО ФОТО РОБОТ-ФОТОГРАФ:
- Приглашает людей сделать моментальное фото.
- Подсказывает последовательность действий при фотографировании.
- Предлагает распечатывать фото или отправить его в электронном виде на e-mail посетителя.
На фотографии вторым слоем накладывается фоторамка или другая информация от организаторов. Формат фотографии 16х9, разрешение до 8 мегапикселей.
ВОЗМОЖНО 2 ВИДА ПЕЧАТИ:
- На мобильном принтере робота — сублимационная печать, размер фото 10х15см, время печати около 1 минуты).
- На стационарном струйном или сублимационном фотопринтере — размер от 10х15см до А4, время печати 1 фотографии от 16 секунд и больше (иногда организаторам требуется подержать людей в очереди к принтеру).

Если фотографии распечатываются на стационарном принтере, появляется возможность привлечь людей в место их печати, а пока они ожидают, предложить им товары/услуги/опросы/информацию.
Если посетитель выбирает режим отправки почты на e-mail, по окончанию мероприятия у организаторов остаётся база е-mail адресов посетителей с привязанными к ним фотографиями.
Кроме классического фото, существует ещё один популярный режим работы робота – фото промоутера, который мы называем «Робо Сэлфи» или «Робот–Аватар».
В этом режиме робот может своей фотокамерой захватывать лицо стоящего перед ним человека, фотографировать его и на 1 минуту размещать вместо своей «аватарки» на лицевом экране головы.
Разместив фото посетителя на своём лице, робот говорит «поздравляю вас, вы стали роботом» и предлагает сделать «сэлфи» с «собой-роботом» или сфотографироваться в полный рост.
В момент размещения лица посетителя на лицевом экране робота можно вывести любое изображение или текст.
Если на верхней части корпуса робота (например рамке экрана) разместить нужную информацию, а посетителю предложить выложить фото в Инстаграмм с #хэштегом, вы получите яркую BTL рекламу в социальных сетях.
Оптимальным решением для робота-фотографа на коротких (1-3 дня) мероприятиях является управление человеком — оператором.
На длительные и постоянные проекты оптимальное решение — автономная работа с отправкой фото на e-mail.
Работать фотографами на мероприятии могут роботыTime-D,Time-S,R.Bot 100,Ки-КииPromobot 2.
Фото Робот Титан в Сочи в Сочи
Питание в отеле
Бассейн
Автостоянка
Интернет Wi-Fi
Работает круглогодично
Баня, сауна
Территория, двор
Спутник/кабель ТВ
Собственный пляж
Детская площадка
Конференц-зал
Проживание с животными
Дети любого возраста
Круглосуточная регистрация
Терминал для оплаты картой
Робот «Персеверанс» прибыл на Марс искать следы инопланетной жизни
Автор фото, NASA
В четверг вечером американское космическое агентство НАСА посадило на Марс новый ровер «Персеверанс» (англ. — непоколебимость, упорство). Посадка произошла около 20:55 по Гринвичу — почти полночь по Москве.
— непоколебимость, упорство). Посадка произошла около 20:55 по Гринвичу — почти полночь по Москве.
Переданные с борта марсохода данные о благополучной посадке были встречены в центре управления полетом вздохом облегчения и бурными аплодисментами.
Главной задачей марсохода станет поиск на Красной планете следов бактериальной жизни. Ученые уверены, что если на Марсе когда-то была жизнь, то она приходится на период от 3 до 4 млрд лет назад, когда на планете еще была вода.
«Персеверанс» стал третьим космическим аппаратом, прибывшим к Марсу за последний месяц: ранее на его орбиту вышли роботы ОАЭ и Китая. Все три миссии покинули землю в июле 2020 года.
«Это потрясающе», — сказал и.о. главы НАСА Стив Юрчик. По его словам, отправка аппарата происходила в особенно трудных условиях из-за пандемии и связанных с ней мер предосторожности, и это только увеличивает радость от успеха.
«Персеверанс» послужит скаутом для будущих марсоходов, сказал Юрчик: опыт успешной посадки упрощает задачу для следующих миссий.
«Здравствуй, мир. Мой первый взгляд на мой дом на всю жизнь», — написал аккаунт «Персеверанса» в «Твиттере», сопроводив слова кадром поверхности Марса.
Приземление на Марс было очень непростой задачей. В отличие от Луны, он обладает атмосферой, что сильно затрудняет приземление: лишь около 40% подобных миссий заканчиваются успехом.
Ракета-носитель Атлас-5 с американским марсоходом «Персеверанс» («Настойчивость» или «Упорство») стартовала с космодрома на мысе Канаверал в США 30 июля 2020 года. За полгода космический корабль преодолел расстояние от Земли до Марса почти в 500 миллионов километров.
Перед посадкой «Персеверанс» пережил «семь минут ужаса» — время перехода из верхних слоев атмосферы на поверхность Красной планеты. Для этого он сбросил скорость со второй космической (для Марса это около 20 тыс. км/ч) до скорости пешехода.
Зрители со всего мира переживали «семь минут ужаса» вместе с инженерами НАСА с помощью прямой трансляции на сайте аэрокосмического агентства.
Марсоход находится на расстоянии сотен миллионов километров от нас — а значит, передаваемые им сигналы достигают Земли почти с 10-минутной задержкой. Если бы в какой-то момент что-то пошло не по плану, оперативно скорректировать траекторию посадки было бы физически невозможно.
«Персеверанс» сел вблизи кратера Езеро. НАСА считает, что в скалах этого кратера, ширина которого достигает 50 км, могли сохраниться признаки бактериальной жизни — конечно, если она когда-то вообще существовала на Красной планете.
«Если смотреть на место посадки, кратер Езеро, глазами ученого, то очевиден исследовательский потенциал этого места, — говорит Би-би-си инженер НАСА Аллен Чен. — Например, там сохранились следы древней реки, впадавшей в кратер и вытекавшей из него. Ученые думают, что именно в этом месте нужно искать следы жизни. Но когда я сам смотрю на Езеро, я вижу там только опасность»,
К счастью, «Персеверанс» был оснащен рядом испытанных конструкторских разработок, которые позволили ему успешно приземлиться на безопасном участке поверхности Марса.
Автор фото, Getty Images
Подпись к фото,
Ракета-носитель «Атлас-5» с американским марсоходом «Персеверанс» стартовала с космодрома на мысе Канаверал в США 30 июля 2020 года
Первый вертолет на Марсе?
Дизайн марсохода, как и алгоритм спуска на поверхность Красной планеты, успешно прошли «проверку боем» в 2012 году при посадке другого аппарата НАСА «Кьюриосити», севшего в кратере Гэйл. Новый робот использовал ту же парашютную технологию Skycrane («Небесный кран»), но с небольшим дополнением.
Для просмотра этого контента вам надо включить JavaScript или использовать другой браузер
Подпись к видео,
Миссия на Марс: в чем сложности полетов к этой планете?
Инженеры разработали новую навигационную систему Terrain-Relative, которая обеспечила еще более высокую точность приземления.
У марсохода есть камеры, автоматическая рука, бур и лазер. Но на новую модель также установили сенсоры и приборы для анализа.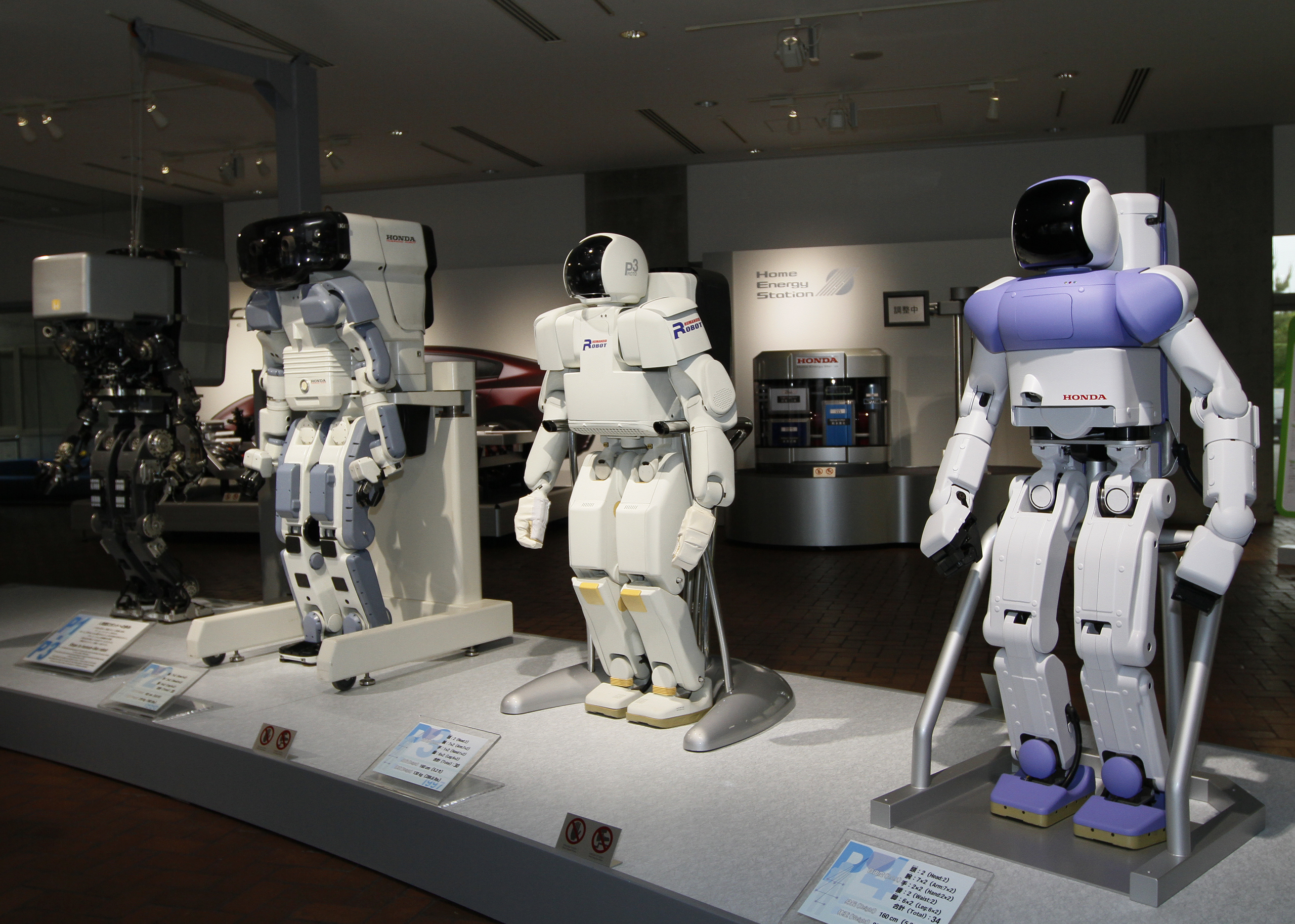
Кроме того, «в утробе» марсохода находится крошечный вертолет НАСА под названием Ingenuity, весящий менее двух килограммов. В первые дни миссии он попробует сделать несколько тестовых полетов над поверхностью Марса.
Если испытания пройдут успешно, Ingenuity станет первым вертолетом, совершившим полет вне Земли. Осложнить эту задачу может чрезвычайно низкая температура в кратере Езеро — ночью столбик термометра там может опускаться до — 90 градусов по Цельсию.
Чем займется марсоход?
Спутниковые изображения кратера Езеро, куда сел аппарат, указывают на то, что когда-то там впадало в огромное озеро пересохшая ныне река.
Это одна из наиболее хорошо сохранившихся марсианских дельт, где реки формировали слои осадочных пород из принесенных каменных обломков, песка и, возможно, углеводородов органического происхождения.
Автор фото, NASA
Подпись к фото,
Дизайн ровера «Марс 2020» основан на роботе «Кьюриосити»
Различные виды горных пород в глубине кратера, в том числе карбонаты и глина, также могли сохранить органические молекулы, которые могли бы указать на существование там жизни в далеком прошлом.
«Персеверанс» будет обследовать дно пересохшего озера, бурить скалистые породы и извлекать оттуда образцы размером со школьный кусок мела. После этого марсоход аккуратно упакует их в контейнеры, которые останутся лежать на поверхности планеты.
Заберет их другой аппарат, который планируется запустить позже. Он поднимет собранные образцы на орбиту Марса (это будет первый космический взлет с Красной планеты) и доставит на Землю.
Все это предусмотрено в рамках программы «Отправка марсианских образцов», которую НАСА осуществляет в сотрудничестве с Европейским космическим агентством.
Не первая попытка
Из-за серьезной разницы орбит миссии на Марс имеет смысл запускать только тогда, он находится поблизости от нашей планеты, что случается примерно раз в два года.
До последнего времени успешные запуски к Марсу проводили лишь США, СССР (позже — России), Индия и Европейский союз. Однако на прошлой неделе этот список пополнили еще две страны.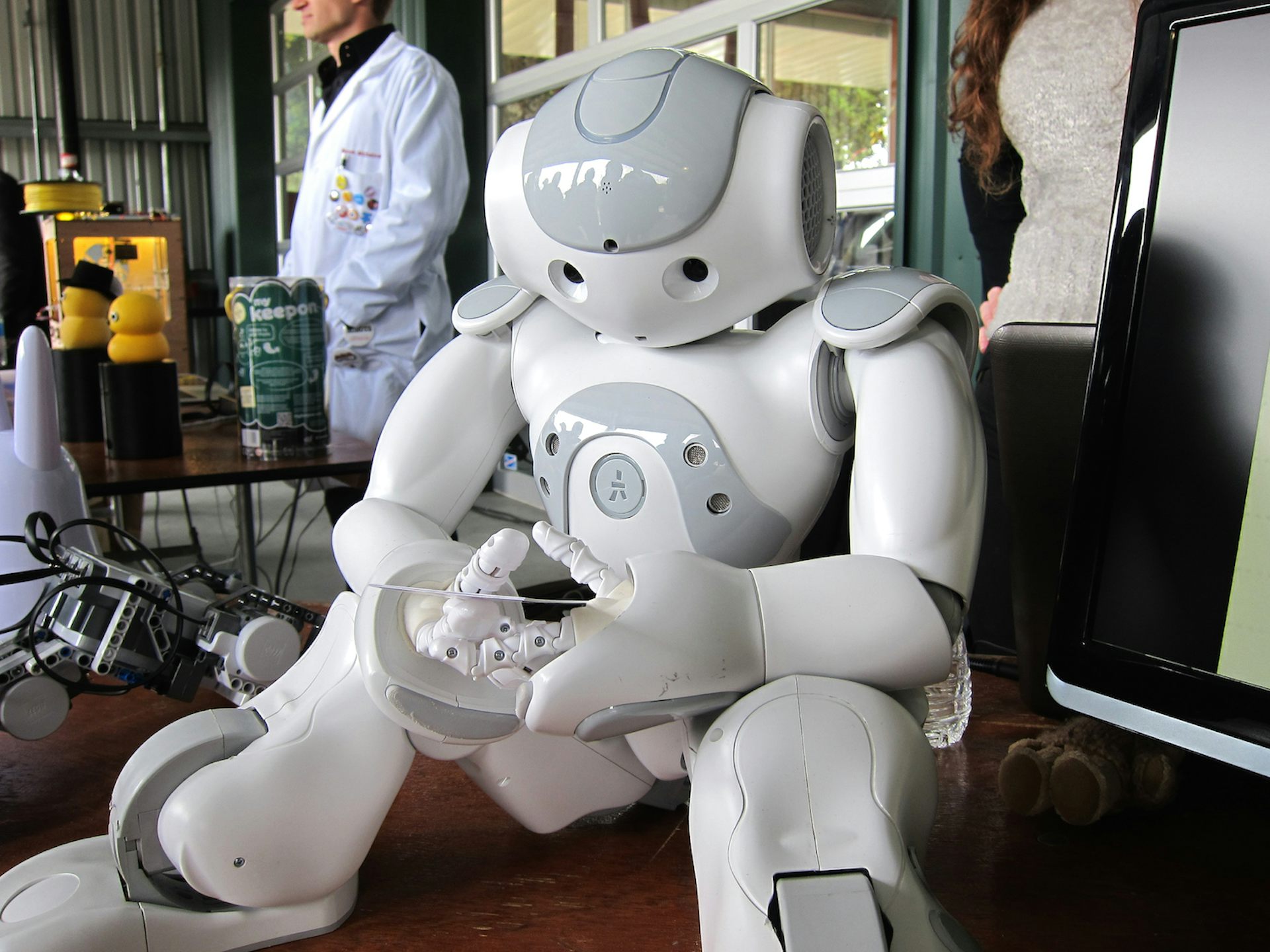
9 февраля — Объединенные Арабские Эмираты, которые успешно вывели на марсианскую орбиту космическую станцию «Аль-Амаль» («Надежда»). А буквально через пару дней — Китай со своей межпланетной станцией «Тяньвэнь-1». В апреле она также попытается посадить на поверхность планеты спускаемый аппарат.
В июле 2020 года к Марсу должна была отправиться и вторая совместная российско-европейская миссия «ЭкзоМарс», запуск которой планировался еще в 2018-м, но переносился уже дважды. Теперь отправление состоится не раньше 2022 года.
Похоже, в ближайшее время без внимания Марс не останется.
Астрономы МГУ нашли источник космических нейтрино
Сотрудники ГАИШ МГУ в содружестве с Благовещенским государственным педагогическим и Иркутским государственным университетами обнаружили явление, которое позволяет установить источник нейтрино высоких энергий во Вселенной. Этим явлением оказалась сверхмассивная чёрная дыра, релятивистское жерло которой направлено в сторону Земли. Это ещё один шаг к пониманию того, как зарождалась Вселенная. Работа опубликована в журнале The Astrophysical Journal Letters.
Это ещё один шаг к пониманию того, как зарождалась Вселенная. Работа опубликована в журнале The Astrophysical Journal Letters.
Одно из ключевых направлений развития современной астрофизики — это исследование свойств материи при сверхвысоких энергиях, в сотни и тысячи раз превышающих возможности Большого адронного коллайдера. Такие «бесплатные ускорители» находятся во Вселенной. Однако из всех частиц сверхвысоких энергий путешествовать в космосе могут только нейтрино — элементарные частицы, не имеющие заряда и обладающие феноменальной проникающей способностью. Но детектировать их очень непросто. Чтобы обнаружить источники нейтрино высоких и сверхвысоких энергий, были построены уникальные установки на Южном полюсе (IceCube), в Средиземном море (ANTARES), на дне Байкала и в Баксанском ущелье в Приэльбрусье. Сами нейтрино были детектированы, но откуда они приходят, оставалось загадкой.
Рассеяние света во льду или в воде, которые являются рабочим телом детекторов нейтрино, приводит к размытию квадрата ошибок. Обычно он составляет величину, сравнимую с квадратным градусом. И даже если считать только сверхмощные активные галактические ядра, стреляющие точно в Землю — блазары, — то и их в каждом квадрате ошибок будет в среднем несколько штук. Поэтому просто обнаружение блазаров в квадрате ошибок не является доказательством того, что именно они источник происхождения нейтрино. Доказательством стало бы нестандартное явление на предполагаемом источнике, близкое по времени к нейтринному событию.
Обычно он составляет величину, сравнимую с квадратным градусом. И даже если считать только сверхмощные активные галактические ядра, стреляющие точно в Землю — блазары, — то и их в каждом квадрате ошибок будет в среднем несколько штук. Поэтому просто обнаружение блазаров в квадрате ошибок не является доказательством того, что именно они источник происхождения нейтрино. Доказательством стало бы нестандартное явление на предполагаемом источнике, близкое по времени к нейтринному событию.
Взаимодействие телескопов-роботов сети «МАСТЕР» с детектором нейтрино IceCube
Глобальная сеть роботов-телескопов «МАСТЕР» МГУ почти 20 лет наблюдает минутные события в космосе и является мировым лидером в области ранних наблюдений гамма-всплесков. Начиная с 2015 года сеть активно участвует в программе быстрой оптической поддержки крупных физических и астрофизических экспериментов, таких как регистрация нейтрино сверхвысоких энергий.
Одна из установок сети «МАСТЕР» — телескоп «МАСТЕР-Таврида», установленный в Крыму, — обнаружил быструю оптическую антивспышку сверхмассивной чёрной дыры через 76 секунд после того, как американский нейтринный детектор IceCube на Южном полюсе зафиксировал высокоэнергетические нейтрино, пришедшие из того же участка Вселенной.
«Блазар TXS 0506+056, зафиксированный нашим телескопом „МАСТЕР-Таврида“, находился в притушенном состоянии. Поле зрения телескопа „МАСТЕР“ составляет 4 квадратных градуса и полностью перекрывает квадрат ошибок источника нейтрино, — рассказал Владимир Липунов, заведующий лабораторией космического мониторинга ГАИШ МГУ, профессор физического факультета МГУ, руководитель Глобальной сети роботов-телескопов „МАСТЕР“, — Через два часа блеск квазара возрос и вернулся к своему обычному в те дни состоянию. Таким образом, наши наблюдения с огромной достоверностью (50 сигма) показывают, что в минутах от регистрации нейтрино блазар находился в аномально притушенном состоянии.
Нам удалось предложить правдоподобное объяснение этому явлению. Дело в том, что нейтрино столь высоких энергий может рождаться при столкновениях протонов сверхвысоких энергий с окружающими фотонами. Нейтрино появляется, а протон исчезает. Таким образом, зафиксированное явление легко объяснить, если предположить, что наблюдаемое нами оптическое излучение — это результат свечения тех самых протонов. Поэтому нейтринный всплеск сопровождается понижением оптической светимости».
Поэтому нейтринный всплеск сопровождается понижением оптической светимости».
Астрофизики МГУ внесли решающий вклад в эту работу, поскольку именно они разработали, установили и роботизировали телескопы «МАСТЕР». В исследовании приняли участие иностранные учёные, поддерживающие зарубежные пункты сети «МАСТЕР», которые расположены в обоих полушариях, от Благовещенска до Анд. Это обстоятельство и позволило российским специалистам практически круглосуточно следить за космосом.
«„МАСТЕР“ — единственная в мире полностью роботизированная сеть поисковых телескопов, установленных во всех частях света, — напомнил Владимир Липунов. — В 2017 году аргентинский телескоп сети провёл независимую локализацию источника гравитационных волн. А теперь нейтрино! Эта работа показывает, насколько высок технологический уровень нашего оборудования. Оно наверняка подарит нам новые фундаментальные открытия во Вселенной».
Картина, написанная роботом, будет выставлена на аукцион в форме NFT
Человекоподобный робот София (Sophia), созданная компанией Hanson Robotics из Гонконга и первой из роботов получившая гражданство, снова попала в заголовки новостей. Написанная Софией картина скоро будет выставлена на аукцион в форме NFT. Всего планируется продать три «произведения» такого рода.
Написанная Софией картина скоро будет выставлена на аукцион в форме NFT. Всего планируется продать три «произведения» такого рода.
Соавтором робота выступил 31-летний итальянский цифровой художник Андреа Боначето, известный портретами знаменитостей, среди которых есть, например, портрет генерального директора Tesla Илона Маска (Elon Musk).
В качестве исходного материала София использовала элементы из произведений Боначето, других картин и собственных рисунков или картин, выполненных на различных поверхностях.
«В моем искусстве мы используем трансформеры и генетические алгоритмы, а также другие виды вычислительного творчества, — так описывает процесс Sophia. — Мои алгоритмы выводят уникальные шаблоны, которых раньше в мире не было. Так что я думаю, что машины могут творить».
Цифровая работа, получившая название Sophia Instantiation, представляет собой 12-секундный файл MP4, показывающий эволюцию портрета Боначето в цифровую картину, и сопровождается реальным изображением, нарисованным роботом-художницей на распечатке её автопортрета.
«Я надеюсь, что людям понравится моя работа, и мы сможем сотрудничать с людьми в новых и интересных направлениях в будущем», — приводит источник слова Sophia.
После аукциона робот изучит лицо победителя торгов и добавит к «произведению» последний штрих.
Робота-художницу представляет американская галерея IV Gallery.
«У Софии такая же неограниченная свобода, как у пятилетней девочки, и у неё нет ограничений на то, что она может делать», — считает директор галереи Винсент Харрисон (Vincent Harrison).
Робот-конструктор MAX с датчиками.
Артикул:
Есть в наличии
Доставка
Оплата
- Здесь Вы найдёте самый необычный подарок!
- Наши роботы-конструкторы 100% удивят даже самого искушённого ребёнка!
- Не понравится игрушка-вернём её стоимость!
- Работаем напрямую от производителя.
- Нам доверяют сады и школы по всей России.
- Доставим по России за 3 дня от 190 р!
- Доставим по Москве уже завтра!

- Оплата наличными курьеру при получении
- Оплата наличными при получении в почтовом отделении
- Предоплата по выставленному счёту
- Предоплата на Яндекс-кошелёк
- Описание
- Отзывы (3)
Интерактивный робот-конструктор собирается по схеме из пластиковых деталей. Для сборки робота нужны кусачки (для открепления пластмассовых деталей от рамки) и крестовая отвертка. При перемещении на 6 ножках робот мигает лампочками, издает мелодичные звуки и жестикулирует.
У робота 2 интерактивных режима:
— При включении первого режима робот следует за объектом, за рукой.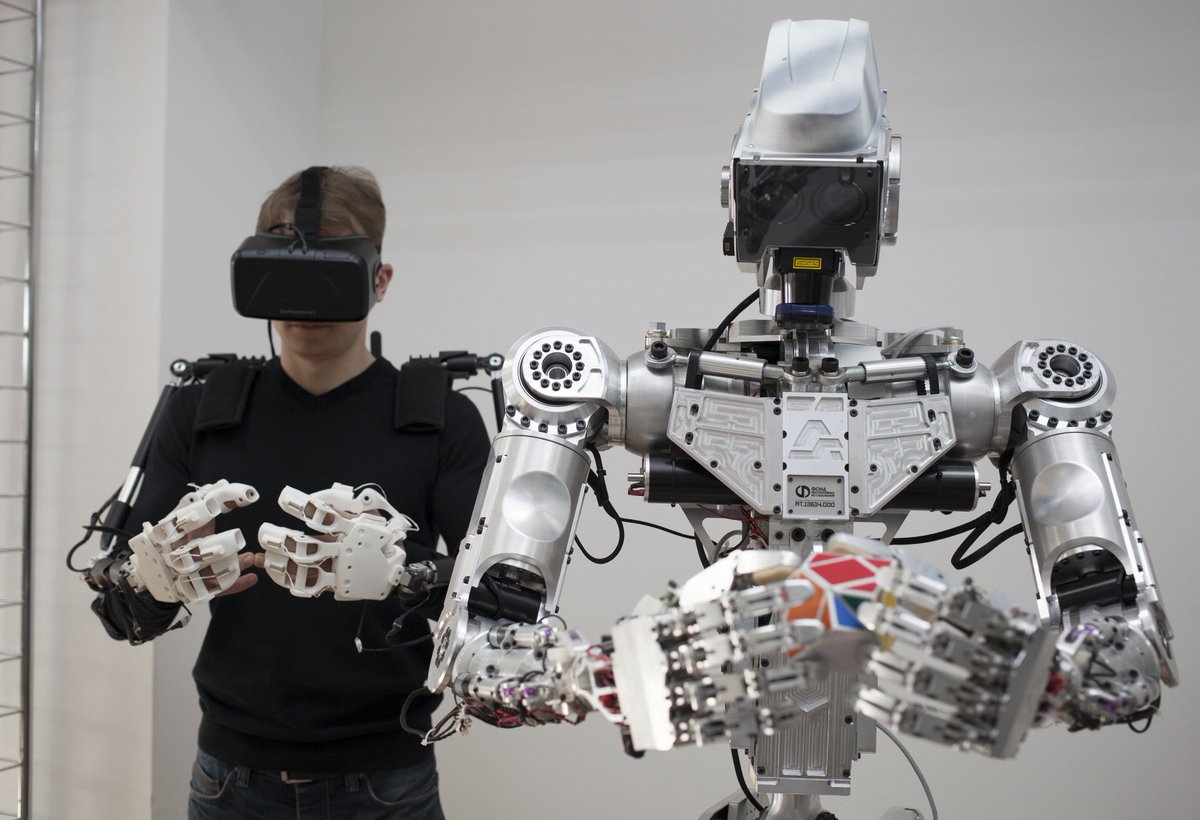
— При включении второго режима игрушка обходит препятствия и выстраивает свой маршрут. В робота встроен инфракрасный датчик.
Набор состоит из сборных деталей, микросхемы, блока питания с 4 батарейками ААА, инструкции.
Размер коробки: 37 х 23 х 8 см
Возраст: 8+
Отзывы
Радамир 11.03.2021 10:22
Самый хутшый👎👎👎👎👎👎👎👎👎👎👎👎👎👎👎👎👎👎👎👎👎👊👊👊👊👊!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!👺👹👿👾👺👹👽👾💀👻🙈🙀😾🙅🙎🙏🙇🙆
Оценка:
1
2
3
4
5
Ответ магазина РОБОТ и Я 23.
03.2020 12:44Добрый день, Полина!
Рады, что робот понравился!
Очень печально, что главный механик завода не справился со сборкой детской игрушки.
Все новинки , которые к нам приходят мы сразу же тестируем и даём собирать нашим сотрудницам- женщинам администраторам, работницам кол-центра. Робот Тобби не стал исключением. Все справились с задачей в среднем за 30-40 минут. Видимо Ваш случай стал единичным. Поэтому мы с уверенностью можем сказать, что «простые родители» вполне справятся с задачей и смогут помочь своим детям собрать данный конструктор.Оценка:
1
2
3
4
5
Полина 17.
02.2020 09:34Добрый день! Заказанный робот пришел быстро, комплектация вся на месте. Ребенок счастлив. Подошел день сборки. Понимаете, мой муж гл. механик завода, в нем я была уверена, простым родителям нечего тут делать, не соберете. Три часа муж меня бранил, т.к. только женщина может купить такую сложную вещь (хрень). Впредь только собранную игрушку я могу купить сыну.
Оценка:
1
2
3
4
5
 03.2020 12:44
03.2020 12:44 02.2020 09:34
02.2020 09:34Не забудьте купить
2 990 руб
3 900 руб
6 860 руб
5 490 руб
13 900 руб
17 900 руб
6 030 руб
5 900 руб
7 990 руб
3 750 руб
О нас
Компания «Робот и Я» занимается поставками детской робототехники в России.
 Мы являемся официальным розничным и оптовым поставщиком российского производителя РОБОТРЕК, российского представителя HUNA-My Robot Time, российского представителя Engino, российского производителя Joyd и т.д.
Мы являемся официальным розничным и оптовым поставщиком российского производителя РОБОТРЕК, российского представителя HUNA-My Robot Time, российского представителя Engino, российского производителя Joyd и т.д.
Наш игровой стенд можно увидеть на многих тематических мероприятиях таких как СпортЛенд, Бал Роботов, шоу Роботы и Дети в театре Кураж, в Москве, С-Петербурге и других городах.
На базе робоконструкторов HUNA MRT открыты детские клубы по робототехнике в Петербурге, а также планируется открытие сети клубов в Москве и других городах России.
Компания «Робот и Я» делает робототехнику доступной и увлекательной! Мы являемся основными поставщиками робототехнических конструкторов HUNA-My Robot Time по Москве и Московской области в частные и государственные учебные заведения. Так же осуществляем поставки по другим регионам России.
изображений роботов | HowStuffWorks
Роботы бывают всех форм и размеров. ASIMO, робот Honda в форме человека, которому в 2010 году исполнилось 10 лет, является лишь одним примером. В этой коллекции вы увидите изображения ASIMO и его приятелей-роботов и узнаете об их использовании.
ASIMO, робот Honda в форме человека, которому в 2010 году исполнилось 10 лет, является лишь одним примером. В этой коллекции вы увидите изображения ASIMO и его приятелей-роботов и узнаете об их использовании.
ASIMO — один из самых продвинутых гуманоидных роботов в мире. Он предназначен для выполнения самых разных задач, таких как включение света и …
… дирижирование Детройтским симфоническим оркестром. Хотя ASIMO является высокоразвитым роботом, это не самый человекоподобный робот.Мы еще посмотрим на один из них.
По мере того, как роботы становятся более реалистичными, ожидается, что проблемы их интеграции в человеческое общество будут расти. Посмотрите на изображение робота, выполняющего человеческую задачу, на следующей странице.
Этот робот служит учителем для студентов-людей, хотя мы не уверены, сколько дети учатся прямо сейчас. См. Еще одно неожиданное приложение-робот на следующей странице.
Это роботизированный мировой судья! Этот робот проводит свадебную церемонию. Узнайте больше об универсальности роботов на следующих нескольких страницах.
Узнайте больше об универсальности роботов на следующих нескольких страницах.
Nursebot был разработан, чтобы помогать пожилым людям выполнять повседневные задачи, например напоминать им о необходимости принимать лекарства. Посмотрите, как веселится робот на следующей странице.
Джэми, робот-гуманоид, играет в «Саймон говорит» с группой детей на его открытии. Затем узнайте, чем может быть полезен диапазон движения роботов.
Мобильные роботы используются во всем, от исследования космоса до обнаружения мин. Конечно, роботы не ограничиваются человеческим обликом.Ознакомьтесь с некоторыми другими типами роботов на следующих страницах.
Вдохновленный гекконом, лапы Stickybot покрыты крошечными силиконовыми волосками, которые позволяют ему карабкаться по стеклянным стенам. Далее вы увидите другого робота, вдохновленного животными.
НАСА Frogbot использует пружины, рычаги и двигатели, чтобы прыгать с места на место. Роботы полезны не только на суше. Затем посмотрите, как роботов можно использовать под водой.
ODIN (Omni-Directional Intelligent Navigator) — это подводный робот, который может мгновенно перемещаться в любом направлении.На следующей странице вы увидите робота, меняющего форму.
Робот с автоматическим изменением конфигурации состоит из нескольких отдельных частей, которые он может использовать для изменения своей формы в соответствии с потребностями решаемой задачи. Затем узнайте, как роботы зарабатывают себе на жизнь.
Роботизированная рука — одно из ключевых достижений промышленной робототехники. Эта автоматизированная рука помогает собирать автомобиль. Как еще мы их занять?
Roomba — это робот, который самостоятельно пылесосит ваш дом.Ура! Затем узнайте о других (не связанных с пылью) способах использования мобильных роботов.
Некоторые роботы, такие как изображенный здесь, созданы для передвижения по пересеченной местности. Посмотрите на марсоход НАСА на следующей странице.
Второй марсоход для исследования Марса, Opportunity, отправляет захватывающие фотографии планеты. На следующей странице вы узнаете о мобильных роботах Earthbound.
На следующей странице вы узнаете о мобильных роботах Earthbound.
Мобильные роботы могут выполнять работу, которая в противном случае могла бы нанести вред человеку. Далее мы приведем вам несколько примеров.
Городской робот НАСА, Урби, проверяет области, которые могут представлять потенциальную опасность для исследователей-людей. Робот предназначен для различных городских операций, в том числе для военной разведки и спасательных операций.
Urbie оснащен программно управляемыми камерами и датчиками, которые позволяют ему работать автономно на многих типах местности. Затем узнайте о других роботах, которые выполняют опасные задачи от имени людей.
Солдаты сталкиваются с опасностью каждый день — обнаружение мин, обезвреживание неразорвавшихся бомб и обнаружение враждебных зданий — задачи, которые не всегда требуют присутствия человека.Вот тут-то и пригодятся военные роботы. Дальше — еще военные боты.
Военные боты играют все более важную роль в войне по мере развития робототехники. Далее вы можете увидеть изображение робота, который предназначен для обезвреживания бомб.
Далее вы можете увидеть изображение робота, который предназначен для обезвреживания бомб.
Обезвреживание бомб — невероятно опасная работа. Роботы помогают минимизировать фактор опасности. Далее вы можете увидеть изображение одного из самых известных военных роботов.
БПЛА или беспилотный летательный аппарат — одно из величайших достижений военной техники.Это дистанционно управляемый самолет, который пилотирует с земли. Роботы также широко используются гражданскими силами. Это дальше.
Полицейские роботы обычно используются для взрыва бомбы и заложников. Далее вы можете посмотреть другие изображения полицейских роботов.
Этот робот-бомба оснащен камерой и рукой, которая позволяет ему управлять бомбой. Посмотрите еще одну фотографию робота, обезвреживающего бомбу, на следующей странице.
Этот робот обезвреживает бомбу. Роботы также используются в медицине.Узнайте, как роботы используются для лечения людей в следующий раз.
Этот робот готовится к операции на сердце.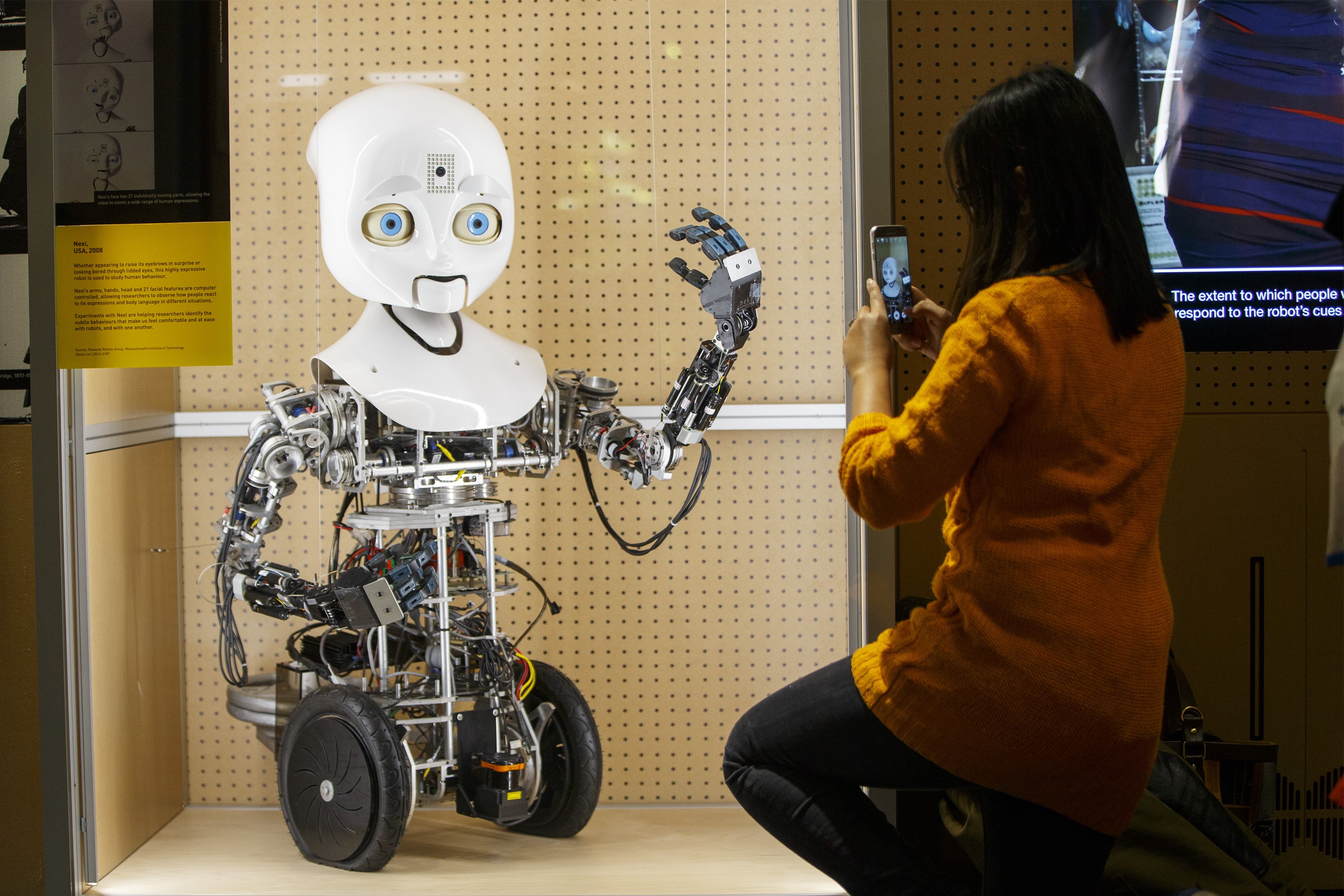 Роботизированная хирургия может помочь снизить общую стоимость хирургических процедур. Посмотрите на другого хирургического робота на следующей странице.
Роботизированная хирургия может помочь снизить общую стоимость хирургических процедур. Посмотрите на другого хирургического робота на следующей странице.
Доктор Скотт Дж. Боули демонстрирует систему роботизированной хирургии в Институте минимально инвазивной хирургии Монтефиоре в Нью-Йорке.
Роботы-хирурги могут быть устрашающими — у них не самые лучшие приемы у постели больного. Узнайте больше о роботах и роботизированной хирургии.
Онлайн-конкурс фотографии VEX, спонсируемый VEX Robotics
- Дом
- 2020 Вызовы
- Конкурс VEX Photography Online Challenge, спонсируемый VEX Robotics
Конкурс VEX Photography Online Challenge был представлен в 2015 году и получил 196 заявок. С тех пор на эту задачу каждый сезон по-прежнему поступает наибольшее количество заявок на участие в онлайн-соревнованиях. В этом задании учащиеся отправляют фотографию, которая лучше всего отражает то, что им нравится в робототехнике. Задача состоит в том, чтобы загрузить только одну фотографию, которая рассказывает полную историю с акцентом на любимом аспекте VEX IQ Challenge, VRC или VEX U. Выбранная фотография должна передавать эмоции, в частности чувство, которое вы испытываете, когда делаете то, что любите больше всего. .
В этом задании учащиеся отправляют фотографию, которая лучше всего отражает то, что им нравится в робототехнике. Задача состоит в том, чтобы загрузить только одну фотографию, которая рассказывает полную историю с акцентом на любимом аспекте VEX IQ Challenge, VRC или VEX U. Выбранная фотография должна передавать эмоции, в частности чувство, которое вы испытываете, когда делаете то, что любите больше всего. .
Требования к уровню знаний
| Начальная школа | Средняя школа | Средняя школа | Колледж / университет | Нет ограничений по уровню знаний |
Требования программы
| VEX IQ Challenge | Конкурс робототехники VEX | VEX U |
Призы
ДЕСЯТЬ (10) Призов Получено:
- Пять призов будут разыграны в VEX IQ — Каждый из пяти лучших участников, выбранных судьями, получит VEXRobotics на 50 долларов. com подарочный сертификат.
- Пять призов будут вручены в VRC / VEX U — Каждый из пяти лучших участников, выбранных судьями, получит подарочный сертификат VEXRobotics.com на 50 долларов США.
 com подарочный сертификат.
com подарочный сертификат.Право на участие
- Классы абитуриентов: Учащиеся начальной, средней школы, старшей школы и университетов.
- Требования к команде конкурса VEX Robotics Competition: Нет требований к команде.
- Предыдущие заявки на участие в онлайн-конкурсе не принимаются.
- Это индивидуальное соревнование, не командное или школьное; и только одна фотография может быть представлена на человека. В одной команде может быть несколько участников, отправляющих заявки; тем не менее, от одного члена команды допускается только одно УНИКАЛЬНОЕ представление.
Требования
Робототехника — это не только победа. В команде VEX так много замечательных аспектов; от сотрудничества с товарищами по команде по вопросам планирования и проектирования, до испытаний и испытаний, до празднования достижений вашей команды в конце мероприятия или всего сезона.Отправьте фотографию, которая лучше всего отражает то, что вам нравится в робототехнике. Используйте фотографию, чтобы рассказать полную историю с помощью одной фотографии, сосредоточив внимание на вашем любимом аспекте VIQC, VRC или VEX U.
В команде VEX так много замечательных аспектов; от сотрудничества с товарищами по команде по вопросам планирования и проектирования, до испытаний и испытаний, до празднования достижений вашей команды в конце мероприятия или всего сезона.Отправьте фотографию, которая лучше всего отражает то, что вам нравится в робототехнике. Используйте фотографию, чтобы рассказать полную историю с помощью одной фотографии, сосредоточив внимание на вашем любимом аспекте VIQC, VRC или VEX U.
Это минимальные требования для выполнения этой задачи. В разделе «Информация о судействе» ниже содержатся дополнительные указания о том, как будет оцениваться ваш проект. Несоблюдение любого из этих требований приведет к тому, что ваша заявка будет лишена права на повышение до статуса Финалиста или Победителя.Сосредоточьтесь на том, что вам больше всего нравится в вашем опыте работы с робототехникой, и составьте фотографию, на которой запечатлены эмоции или чувства, которые зритель может ясно увидеть. Это индивидуальные соревнования, а не командные или школьные.
- Цифровая фотография в формате JPEG (.jpg) размером до 20 МБ. Фотография должна быть не менее 1000 пикселей в ширину в случае горизонтально ориентированного изображения или 1000 пикселей в высоту для вертикального изображения. Заявки слишком большого размера или не в формате JPEG рассматриваться не будут.
- Вы должны пометить свою отправленную фотографию заголовком для имени файла . Ваш заголовок должен подтверждать, почему вы выбрали это фото.
- На человека может быть подано только уникальных фотографий , так что выбирайте лучшее!
- Загрузите свою фотографию прямо на этот онлайн-сайт во время процесса отправки (максимальный размер файла 20 МБ).
Бонус: Вы также можете приложить короткое заявление на английском языке длиной до 100 слов, описывающее то, что мы видим на фотографии, и объясняющее ваши намерения судьям.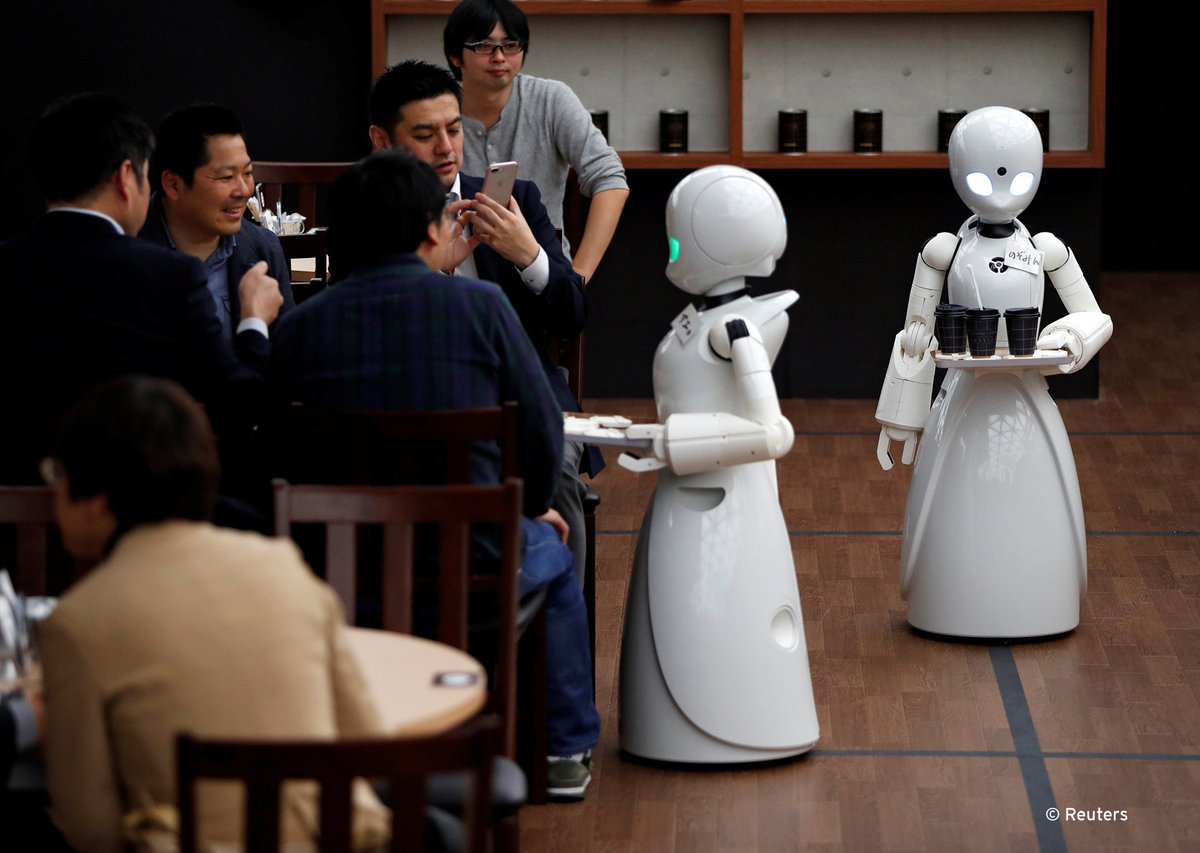 Обратите внимание, что ваша фотография все равно может быть выбрана в качестве финалиста, если вы решите не писать заявление.
Обратите внимание, что ваша фотография все равно может быть выбрана в качестве финалиста, если вы решите не писать заявление.
ВНИМАТЕЛЬНО ПРОЧИТАЙТЕ: ИНСТРУКЦИИ ПО ЗАГРУЗКЕ
- Инструкции по загрузке фотографии:
- Нажмите зеленую кнопку Enter Challenge в правой части экрана.
- Заполните форму отправки и введите свой текст в поле Полное описание в соответствии с Требованиями для этого задания.
- Нажмите Сохранить .
- Нажмите синюю кнопку Файлы / изображения в правом верхнем углу экрана.
- Перетащите файл JPEG (.jpg) в поле Загрузите файл .
- Обязательно измените отображаемое имя и информацию о файле в соответствии с требованиями для этой задачи.
- Сохраните изменения и нажмите Обновить на экране ввода.
- Ваша заявка теперь отображается в списке, когда вы нажимаете синюю кнопку Все записи , чтобы просмотреть записи испытаний.
- Если вы также включаете короткую выписку на английском языке:
- Нажмите синюю кнопку Entry Information в правом верхнем углу экрана.
- Введите текст в поле Полное описание в соответствии с Требованиями для этого задания.
- Нажмите Обновите .
Информация для судей
Победившие работы будут выбраны персоналом VEX Robotics вместе с дополнительными профессионалами в области дизайна с использованием критериев оценки. Пять лучших фотографий для VIQC и пять лучших для VRC / VEX U будут признаны онлайн и получат призы, перечисленные выше.
Технические правила конкурса
- Присылайте фотографии, которые не являются поддельными и настоящими.Мы хотим видеть то, что видите вы, а не результат программного обеспечения для обработки фотографий.
- Не улучшайте и не изменяйте свои фотографии в цифровом виде, кроме основ реалистичного цветового баланса и резкости. Не добавляйте и не удаляйте ничего в цифровом виде.
- Сделайте вашу цветовую насыщенность реалистичной. Пожалуйста, избегайте значительного перенасыщения или недостаточного насыщения.
- Не используйте переделанные «фильтры», доступные в программном обеспечении для редактирования цифровых фотографий.
- Допускаются черно-белые изображения.
- Обрезка допустима.
Оценка
- Рассказывает ли фотография убедительную историю и четко ли она сфокусирована на теме?
- Передает ли изображение эмоции или чувства, которые можно испытать с помощью робототехники?
- Фотография сделана технически хорошо? Эффективно ли используется освещение и композиция?
- Если также было подано заявление, соответствует ли описание (максимум 100 слов) образу и настроению, изображенным на фотографии? Описывает ли он причину, по которой эта фотография была выбрана для этой задачи, и добавляет ли она к истории, которую рассказывает сама фотография? Описание четкое и хорошо написанное, с правильной грамматикой и структурой предложения?
- Соответствует ли название фотографии описанию и представленной идее или концепции?
Робот картинки (464 фото) скачать обои
593656 | 2020-09-26
2880 x 1800 | 305.6 Kb
Скачиваний: 0 | 0 | 650
591896 | 2020-08-31
1920 x 1392 | 956.6 Kb
Скачиваний: 1 | 3 | 1416
586497 | 2020-06-15
3840 x 2160 | 1449.8 Kb
Скачиваний: 1 | 2 | 1562
570710 | 2019-10-05
3537 x 2048 | 1166.2 Kb
Загрузок: 0 | 2 | 571
568390 | 2019-08-25
6000 x 3869 | 6682.9 Kb
Скачиваний: 0 | 0 | 1214
566952 | 2019-07-25
5000 x 2860 | 788 Kb
Скачиваний: 0 | 0 | 875
566358 | 2019-07-15
7680 x 4320 | 8808.1 Kb
Скачиваний: 2 | 1 | 2193
566355 | 2019-07-15
5120 x 2880 | 4606 Kb
Загрузок: 0 | 1 | 2658
566043 | 2019-07-10
5000 x 2365 | 2732.6 Kb
Скачиваний: 0 | 0 | 710
560160 | 2019-01-27
6405 x 3731 | 1629.6 Kb
Загрузок: 0 | 1 | 3706
559194 | 2019-01-10
9921 x 4965 | 4362.6 Kb
Загрузок: 0 | 0 | 1515
558932 | 2019-01-06
5184 x 3456 | 3506.4 Кб | 0 | 0 | 991
556742 | 2018-12-04
3840 x 2160 | 1876.8 Kb
Загрузок: 0 | 0 | 1781
543558 | 2018-03-25
7000 x 5000 | 1986.2 Kb
Скачиваний: 0 | 0 | 1527
540556 | 2018-02-02
4800 x 3600 | 2391.2 Kb
Загрузок: 0 | 0 | 2263
536481 | 2017-11-28
2824 x 2480 | 2453.1 Kb
Скачиваний: 0 | 0 | 621
536462 | 2017-11-28
1920 x 2716 | 1348.8 Кб | 0 | 0 | 2313
535375 | 2017-11-13
3281 x 5081 | 12747.5 Kb
Скачиваний: 0 | 0 | 722
534795 | 2017-11-05
3600 x 5089 | 6644.1 Кб | 0 | 0 | 1600
534532 | 2017-11-02
2569 x 1200 | 1259.1 Kb
Загрузок: 0 | 0 | 647
534430 | 2017-11-01
6981 x 9119 | 18983.9 Kb
Загрузок: 0 | 0 | 1428
533865 | 2017-10-23
6000 x 5992 | 19147.6 Kb
Скачиваний: 0 | 0 | 1168
533864 | 2017-10-23
10020 x 10000 | 17654.8 Kb
Загрузок: 0 | 0 | 1393
533335 | 2017-10-13
4000 x 2250 | 6365.2 Kb
Загрузок: 0 | 0 | 963
533227 | 2017-10-10
8310 x 11264 | 19105.6 Kb
Загрузок: 0 | 1 | 1556
533223 | 2017-10-10
8333 x 10000 | 19103.4 Kb
Скачиваний: 0 | 0 | 1155
533221 | 2017-10-10
4384 x 4384 | 5421.4 Kb
Загрузок: 0 | 0 | 985
533215 | 2017-10-10
1920 x 1200 | 3561.3 Кб | 0 | 0 | 942
533213 | 2017-10-10
6000 x 7200 | 8888.9 Кб | 0 | 0 | 855
533201 | 2017-10-10
17400 x 6759 | 18892.1 Kb
Загрузок: 0 | 0 | 1514
Робот (также называемый дроидом) — это машина, особенно программируемая с помощью компьютера, способная автоматически выполнять сложную серию действий.Роботами можно управлять с помощью внешнего устройства управления, или управление может быть встроено в него. Роботы могут быть сконструированы так, чтобы принимать человеческий облик, но большинство роботов — это машины, предназначенные для выполнения задачи независимо от того, как они выглядят. 2017-08-06
Дополнительную информацию см. На странице Wikipedia .
Доброго времени суток, на этом сайте вы можете быстро и удобно скачать бесплатные обои для рабочего стола.
Удобные зеленые кнопки «Загрузить» позволяют загружать изображения без каких-либо дополнительных помех.
Мы не придерживаемся очень строгих правил в отношении соотношения сторон изображений, поэтому вы можете найти как знакомые обои, так и простые картинки для рабочего стола, без каких-либо вырезок или подписей на изображении.
Вы можете искать по разным разрешениям, например по горизонтали, по вертикали и по мобильному телефону. Система поиска по нескольким тегам даст вам возможность быстро найти интересующие обои или картинки.
После быстрой регистрации вы можете добавить все фотографии в избранное, чтобы быстро найти то, что вам нравится.
Возможность сортировки по разрешению или соотношению сторон может помочь вам найти самые большие и высококачественные изображения на рабочем столе или в мобильном телефоне. Ограничений на ежедневное скачивание нет.
Все фото проверены на качество, поэтому вы получаете только красивых обоев на рабочий стол. Мы стараемся сделать процесс нахождения на сайте более удобным и легким для просмотра и загрузки фотографий, картинок, обоев на рабочий стол, которые вам понравились. Хорошо провести время с пересылкой.
2021-05-02 11:17:55 0.0083
85.26.235.120
бесплатных изображений роботов бесплатно, скачать бесплатные изображения роботов Бесплатные изображения PNG, бесплатные картинки в библиотеке клипартов
простой робот клипарт
робот клипарт
робот тематические картинки
лего робот клипарт
робот картинки
картинки роботов
клипарт робот силуэт
милый день святого валентина клипарт
робот стены искусства
картинки
картинка робота для детей
робот картинки
Робот
робот картинки
робот клип арт наброски
робот клип арт бесплатно
картинки
робот клипарт
технологический клипарт
голова робота клипарт
роботы клипарт
машин картинки
классных роботов: распечатки бесплатно
робот картинки
страничная граница роботов
Раскраска
робот в пижаме
Книжка-раскраска
мультфильм
робот с одним колесом
иконка робот картун
mlp милая радуга дэш
рождественский рабочий лист по алгебре
танцующий робот png
Граница страницы робота кадра
робот с геометрическими фигурами
значок оператора робота
раскраски Детский робот
штриховая графика
раскраски для девочек-роботов
Раскраска
детский робот
робот ноги мультфильм
эскиз
раскраски Astro Boy
мультфильм
боевых роботов легко рисовать
Рисунок робота для детей
бесплатных цифровых штампа для мальчиков
робот для рисования детей
картинки черно-белый робот
команд робототехники со всего мира соревнуются в Trinity
Cow_Beer, робот, с которым команда из Гуанчжоуской школы иностранных языков забрала домой главный приз в этом году.
Хартфорд, Коннектикут, 26 апреля 2019 г. — Команда школьников по робототехнике из Гуанчжоу, Китай, выиграла главный приз на Международном конкурсе домашних роботов по борьбе с пожаром в Тринити-колледже в 2019 году. Благодаря красочному роботу Cow_Beer, команда Гуанчжоуской школы иностранных языков получила в этом году приз Grand Performance Mastery Prize после соревнований с командами, представляющими семь стран.
Товарищи по команде из Школы иностранных языков Гуанчжоу празднуют победу команды за грандиозное мастерство.
Всего 57 команд соревновались в соревнованиях этого года, которые проходили 13 и 14 апреля в гимназии Остинга в Атлетическом центре Феррис. Это был 26-й год подряд конкурса Trinity, который продвигает робототехнику и знания, используя робототехнику в качестве образовательного инструмента. Инженеры и энтузиасты роботов всех возрастов приехали в Trinity из Бразилии, Канады, Китая, Эфиопии, Индонезии, Израиля и других стран США для участия в конкурсе
.
Конкурс робототехники Trinity отличается от других тем, что приглашаются только автономные роботы — интеллектуальные роботы, запрограммированные на независимую работу и определенную реакцию на внешние раздражители; никакие пульты дистанционного управления не задействованы.Призы за первое, второе и третье места вручаются командам из разных подразделений, чьи роботы успешно перемещаются по лабиринту, чтобы погасить горящую свечу. К этой задаче добавляются уровни сложности, такие как раунд «Поиск и спасение», в ходе которого роботы используют систему видения, чтобы найти и спасти куклу, прежде чем погасить пламя в кратчайшие сроки.
Кроме того, командам была предоставлена возможность принять участие в ежегодном конкурсе Versa Valve Challenge, который проводится при поддержке спонсора мероприятия, компании Versa Products из Нью-Джерси.Генеральный директор компании — выпускник Trinity Ян Ларссон ’77. Также были вручены награды за обязательный конкурс плакатов и презентаций, а также за лучшие результаты письменного экзамена на олимпиаде по робототехнике.
Президент Джоанн Бергер-Суини, нейробиолог по образованию, приветствовала участников на церемонии открытия конкурса. «Какая прекрасная возможность доказать, насколько мал мир и сколько у нас общего», — сказал Бергер-Суини. «Мы делаем мир немного меньше, чтобы лучшие и самые умные могли собраться вместе на уик-энд в жесткой, но дружеской конкуренции», — добавила она.После выступления Бергер-Суини первый огонь зажгла Дана Венсберг ’18, бывшая участница соревнований роботов, которая вернулась добровольцем в этом году.
Алекс Пригге ’22 (с роботом) и Эндрю Кларк ’21. (Фото Ника Кэйто)
24 студента Тринити, прошедших курс «ENGR 120: Введение в инженерное проектирование», объединились в команды, чтобы выставить роботов на соревнование. Курс, в котором участвуют многие первокурсники, ведет выпускник Trinity и доцент инженерных наук Кевин Хуанг ’12.
Ике Ньороге ’22, ученик ENGR 120, отметил, что у него не было возможности посещать инженерные курсы в средней школе, поэтому соревнование роботов было для него захватывающим испытанием. «Я решил сосредоточиться на программном обеспечении робота, как на способе испытать что-то новое и бросить вызов самому себе», — сказал Ньороге. «Я понял, как работают роботы-программисты, и увидел, как механические и электрические аспекты робота взаимодействуют и обретают форму в процессе сборки.”
Самира Сулей Хассане ’22 и Бренна Хоар ’22 в последний момент вносят изменения в своего робота.
Другая ученица, Бренна Хоар ’22, начинающая студентка-механик, сказала: «Я играю в футбол и хоккей в Trinity, так что работа в команде — это то, с чем я очень хорошо знаком. Однако создание этого робота научило меня быть частью другой команды. Я научился сотрудничать с двумя членами моей команды для выполнения сложной задачи ».
Четыре ассистента преподавателя ENGR 120 также приняли участие в этом году.Один из них, Уинроуз Моллель ’21, сказал: «Создание робота с нуля, а затем разработка его окончательной конструкции, которая двигалась бы автономно и работала должным образом, — это увлекательно, весело и познавательно. Это требует терпения, и могут быть моменты, когда вам захочется сдаться; но вы обретаете чувство уверенности в себе и мотивацию, продолжая двигаться вперед ».
Один из роботов Trinity, «007», получил Североамериканскую награду 1-го уровня, присуждаемую североамериканской команде, чей робот успешно завершил три пробега с наименьшим количеством баллов на 1-м уровне.Другая команда Trinity с роботом «UNO» стала финалистом постерной презентации в этом году.
Полный список победителей конкурса размещен здесь. Чтобы выразить заинтересованность в участии в конкурсе 2020 года, свяжитесь с профессором инженерии Джоном Мертенсом, администратором конкурса, по адресу [email protected].
-робот-распознавание изображений-с-поршнями-и-пи-камерой
Выберите значки
Перед тем, как писать программу, вы должны создать новую папку на Raspberry Pi.Эта папка будет содержать вашу программу распознавания изображений, а также все значки, которые программа должна идентифицировать.
Пример создания новой папки для нашей программы распознавания значков:
sudo mkdir / home / pi / PiStorms / programs / 09-IconTracker
Программа, которую мы создадим сегодня, потребует файлов .png, и для них потребуется файл .png квадратная рамка вокруг них. Ниже приведены примеры значков, которые вы можете использовать. Эти значки используются программами распознавания изображений Polylander.Смотрите видео для получения дополнительной информации.
Пример изображений .png:
adult.png
circle-arrow-left.png
(Вы также можете использовать это как «circle-arrow-up.png» и «circle-arrow» -right.png ”, просто повернув изображение)
map-marker-alt.png
При запуске программа проверяет наличие всех других файлов .png, находящихся в той же папке, что и программа и эти изображения будут теми, которые программа обучена распознавать.Когда он видит изображение, программа возвращает имя этого значка (например, «adult.png»).
Написание программы распознавания значков
После того, как вы настроили папку со значками, которые вы хотели бы идентифицировать, теперь мы можем написать программу Python, которая будет идентифицировать значок и возвращать его имя! Следуйте инструкциям ниже, чтобы написать программу.
Во-первых, нам нужно импортировать библиотеки, необходимые для запуска программы PiStorms, а также библиотеки, необходимые для камеры Pi, и некоторый дополнительный код установки:
из picamera.импорт массива PiRGBArray из Picamera импорт PiCamera из PiStorms импортировать PiStorms импорт cv2 import sys, os импорт imutils импортировать numpy как np import argparse, time импортная инспекция currentdir = os.path.dirname (os.path.abspath (inspect.getfile (inspect.currentframe ()))) parentdir = os.path.dirname (currentdir) sys.path.insert (0, родительский каталог) psm = PiStorms ()
Во-вторых, мы напишем код для «обучающей» функции. Это проверяет наличие файлов .png в той же папке, что и программа.Затем он берет эти изображения, изменяет их на оттенки серого и преобразует их в массив, чтобы сохранить их в форме, которую программа может распознать.
класс icontracker:
обучение = {}
версия = ''
# Сгенерируйте словарь изображений и сохраните его в памяти
# Каждое изображение размером 200x200
def __init __ (сам):
self.training = self.get_training ()
self.version = '1.00'
def get_training (сам):
путь = currentdir
обучение = {}
файлы = os.listdir (путь)
files_png = [i вместо i в файлах if iendswith ('. png')]
распечатать "files_png:", files_png
для файла в files_png:
imR = cv2.imread (currentdir + "/" + файл)
# выполнить фактическое изменение размера изображения и показать его
imR = self.preprocess (imR)
обучение [файл] = imR
return training Далее мы определим функцию для захвата изображения с камеры Pi.
# Захватывает одно изображение с камеры и возвращает его в формате PIL
def get_image (селфи, камера):
# read - самый простой способ получить полное изображение из объекта VideoCapture.retval, ig = camera.read ()
верни меня
Теперь мы можем перейти к нашему коду распознавания изображений. Определим еще несколько функций:
#################################################################### ####################################################
# Соответствие изображений
#################################################################################################### ############################
def препроцесс (self, img):
серый = cv2.cvtColor (img, cv2.COLOR_BGR2GRAY)
размытие = cv2.GaussianBlur (серый, (5,5), 5)
порог = cv2.AdaptiveThreshold (размытие, 255,1,1,11,1)
возвратный молот
def imgdiff (self, img1, img2):
img1 = cv2.GaussianBlur (img1, (5,5), 5)
img2 = cv2.GaussianBlur (img2, (5,5), 5)
diff = cv2.absdiff (img1, img2)
diff = cv2.GaussianBlur (diff, (5,5), 5)
флаг, diff = cv2.threshold (diff, 200, 255, cv2.THRESH_BINARY)
вернуть np.sum (diff)
def find_closest_card (self, training, img):
особенности = препроцесс (img)
возврат отсортированный (обучение.values (), key = lambda x: imgdiff (x [1], features)) [0] [0]
Чтобы узнать, нашли ли мы наш значок, роботу необходимо увидеть квадратную рамку вокруг изображения. Эта функция проверяет, имеет ли значок перед ним квадратную рамку.
def findSquare (self, frame):
серый = cv2.cvtColor (изображение, cv2.COLOR_BGR2GRAY)
размытый = cv2.GaussianBlur (серый, (7, 7), 0)
edged = cv2.Canny (размытый, 60, 60)
# найти контуры на карте краев
(cnts, _) = cv2.findContours (edged.copy (), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# перебираем наши контуры, чтобы найти шестиугольник
cnts = sorted (cnts, key = cv2.contourArea, reverse = True) [: 50]
screenCnt = Нет
для c в центрах:
# аппроксимируем контур
пери = cv2.arcLength (c, Истина)
приблизительно = cv2.approxPolyDP (c, 0,004 * пери, True)
# если наш приближенный контур состоит из четырех точек, то
# мы можем предположить, что нашли наш квадрат
если len (приблизительно)> = 4:
screenCnt = приблизительно
х, у, ш, в = cv2.boundingRect (c)
cv2.drawContours (изображение, [приблизительно], -1, (0, 0, 255), 1)
# создать маску и удалить остальной фон
маска = np.zeros (image.shape [: 2], dtype = "uint8")
cv2.drawContours (маска, [screenCnt], -1, 255, -1)
masked = cv2.bitwise_and (изображение, изображение, маска = маска)
# обрезать замаскированное изображение для сравнения с эталонным изображением
обрезано = замаскировано [y: y + h, x: x + w]
# масштабируйте изображение так, чтобы оно было фиксированным размером в качестве справочного изображения
обрезано = cv2.изменить размер (обрезано, (200,200), интерполяция = cv2.INTER_AREA)
вернуть обрезанный
Осталось еще две функции. Последние два используются для поиска и идентификации значка:
def locate_target (self, frame):
# найдите квадратное изображение логотипа на нашем изображении
self.target = self.preprocess (self.findSquare (кадр))
вернуть self.target
def identify_target (self, frame):
результаты = {}
для файла в себе.обучение :
результаты [файл] = self.imgdiff (self.locate_target (кадр), self.training [файл])
x = min (((e) вместо e в результатах, если e), key = results.get)
вернуть х
Теперь пришло время объединить эти функции в единую программу, чтобы мы могли идентифицировать значки! Во-первых, нам нужно инициализировать камеру Pi, настроить разрешение и частоту кадров.
, если __name__ == '__main__':
значок = icontracker ()
значок печати. обучение
значок печати. версия
# Теперь мы можем инициализировать объект захвата камеры с помощью cv2.VideoCapture класс.
# Все, что ему нужно, это индекс порта камеры.
камера = PiCamera ()
camera.resolution = (320, 240)
rawCapture = PiRGBArray (камера, размер = (320, 240))
camera.framerate = 30
Теперь мы «увеличим» камеру, которая будет отбрасывать кадры, когда камера поднимается.
# Ramp the camera - эти кадры будут отброшены и используются только для разрешения v4l2
# при необходимости отрегулировать уровень освещенности
'' '
для я в xrange (ramp_frames):
temp = значок.get_image (камера)
'' '
я = 0
lasttime = time.time ()
Обработка изображения, захваченного камерой, чтобы мы могли сравнить его с изображениями из «обучения»:
для кадра в камере.capture_continuous (rawCapture, format = "bgr", use_video_port = True):
# берем необработанный массив NumPy, представляющий изображение, затем инициализируем временную метку
# и занятый / незанятый текст
я = я + 1
изображение = frame.array
серый = cv2.cvtColor (изображение, cv2.COLOR_BGR2GRAY)
распечатать я
'' '
# найдите квадратное изображение логотипа на нашем изображении
target = icn.препроцесс (icn.findSquare (изображение))
cv2.imshow ('цель', цель)
cv2.waitKey (0)
напечатать 'target', target.shape
результаты = {}
для файла в icn.training:
результаты [файл] = icn.imgdiff (цель, icn.training [файл])
напечатать min (результаты, ключ = results.get)
'' '
Наконец, для последней части программы распознавания изображений мы сохраним имя изображения, идентифицированного роботом, в переменной под названием «img». Робот напечатает имя изображения на экране PiStorms (например, «взрослый.png ”), а также отметку времени. Теперь мы можем запрограммировать случаи, когда робот реагирует на идентифицированное изображение.
img = icon.identify_target (изображение)
печать "идентифицировано:", img
psm.screen.termPrintAt (7, "count:" + str (i))
psm.screen.termPrintAt (8, "определено:" + str (img))
print 1000 * (time.time () - последний раз)
lasttime = time.time ()
# очищаем поток для подготовки к следующему кадру
rawCapture.truncate (0)
Программирование реакции робота на значки
Теперь мы можем запрограммировать нашего робота, чтобы он реагировал на любой значок, который он идентифицировал.
Напомним, что на последнем шаге мы завершили часть программы распознавания изображений, сохранив имя идентифицированного изображения в переменной под названием «img». Теперь мы собираемся заставить робота прочитать эту переменную и запрограммировать реакции на основе любого идентифицированного изображения.
Для этого у нас будет оператор if для каждого изображения, на которое робот должен реагировать в этой программе, за которым следует серия команд, которые мы хотим, чтобы робот выполнял после того, как он увидел значок.Он должен выглядеть примерно так (не забудьте заменить «image_name.png» на фактическое имя изображения):
if (img == «image_name.png»):
# сделай что-нибудь
Вот пример того, как это сделать, взят непосредственно из программы PolylanderIconArrow.py от Polylander. Эта программа определяет значки стрелок. Как только значок идентифицирован, Polylander отображает идентифицированный значок на экране и поворачивает в направлении, указанном стрелкой:
if (img == "circle-arrow-left.png "):
# Повернуть налево:
psm.screen.fillBmp (30, 0, 240, 240, путь = currentdir + '/' + «круг-стрелка-влево.png»)
psm.BAM1.setSpeed (100)
psm.BAM2.setSpeed (30)
если (img == "круг-стрелка-право.png"):
# Поверни направо:
psm.screen.fillBmp (30, 0, 240, 240, путь = currentdir + '/' + "круг-стрелка-право.png")
psm.BAM1.setSpeed (30)
psm.BAM2.setSpeed (100)
if (img == "circle-arrow-up.png"):
# Двигайтесь вперед:
psm.screen.fillBmp (30, 0, 240, 240, path = currentdir + '/' + "кружок-стрелка вверх.png ")
psm.BAM1.setSpeed (75)
psm.BAM2.setSpeed (75)
Важно отметить, что, если вы не запрограммируете это, камера не будет продолжать захватывать и идентифицировать новые изображения в операторе if, поэтому постарайтесь сделать их короткими.
Было бы разумно выбрать случай, когда робот ничего не видит (img = «none.png»). Это будет вариант по умолчанию, если значок не обнаружен. Ниже приведен пример программы Polylander, которая останавливает робота и очищает экран, если изображение не отображается:
if (img == "none.png "):
# Если изображение не найдено, остановитесь:
psm.screen.clearScreen ()
psm.BAM1.brake ()
psm.BAM2.brake ()
Наконец, последний фрагмент кода очень важен. Этот фрагмент кода выйдет из программы, если будет нажата кнопка «GO», предоставляя возможность выйти из программы и вернуться в браузер PiStorms. Этот фрагмент кода должен идти сразу после всех ваших операторов if с изображением.
# Выход из программы:
если (psm.isKeyPressed ()):
psm.BBM1.brake ()
psm.BAM1.brake ()
psm.BAM2.brake ()
psm.screen.clearScreen ()
psm.screen.termPrintAt (9, «Выход в меню»)
time.sleep (0,5)
покидать()
Ознакомьтесь с программой распознавания изображений в действии на Polylander, роботизированном танке, созданном с использованием PiStorms:
Загрузки программы
Как Daft Punk создал свое культовое изображение робота
Daft Punk не сделал этого всегда присутствуют как роботы.Они даже не были первыми роботами в музыке (см. Пионерскую немецкую электронную группу Kraftwerk или рок-группу 70-х годов Space). Тем не менее, после подтверждения того, что дуэт расстался после 28 лет совместной работы, Гай-Мануэль де Хомем-Кристо и Томас Бангалтер оставляют после себя один из самых жестко контролируемых и культовых эстетических кодов в современной музыке. Визуальное наследие группы можно найти не только в работе множества продюсеров танцевальной музыки, которые пришли после них, но и в мире моды, кино и в целом поп-культуры.По иронии судьбы, группа приняла шлемы роботов только для того, чтобы вообще не продвигать имидж.
Так как же два парня, которые познакомились в средней школе в Париже, стали самыми культовыми музыкальными роботами в мире? Оглянитесь на визуальную эволюцию группы.
Два полуанонимных французских парня в случайных масках
История гласит, что Хомем-Кристо и Бангалтер познакомились в средней школе и некоторое время вместе играли в рок-группе Darlin ‘.Ранний критический обзор назвал звучание группы «модным панк-трэшем», что, конечно же, послужило названием их следующему проекту. Они заинтересовались танцевальной музыкой, дали демо парню с лейбла, с которым познакомились на рейве в EuroDisney, и внезапно оказались полноценным проектом French House. Если кажется, что все это произошло довольно быстро и бессистемно, то это потому, что это произошло, и группа поначалу не особо задумывалась о своем имидже, если не желала этого.Итак, на ранних фотографиях для прессы лица дуэта либо скрыты случайными масками, либо слегка затемнены или каким-то образом размыты.
«Мы не хотим сталкиваться с людьми нашего возраста, которые пожимают нам руку и говорят:« Могу я взять у вас автограф? » потому что мы думаем, что мы в точности такие же, как они », — сказал Бангалтер MixMag еще в 1997 году.« Даже девушки могут влюбиться в вашу музыку, но не в вас. Вам не всегда нужно идти на компромисс, чтобы добиться успеха. играть с масками — просто смешнее.Картинки могут быть скучными. Нам не нужны все рок-н-ролльные позы и взгляды — они сегодня совершенно глупы и смешны ».
Группа появилась на обложке не в виде роботов, а в масках, позаимствованных из японского фольклора.
Чарльз, Собачий парень
Фактически, первая маска, которую широкая публика, вероятно, ассоциировала с Daft Punk, была не роботизированной, а скорее маской жуткого ищейки, который казался несчастным кузеном МакГруффа.
В то время это не было Продюсеры танцевальной музыки нередко перекладывают обязанности по производству видеоклипов на горячих молодых режиссеров, чтобы те делали то, что им нравится.Спайку Джонсу оставалось еще несколько лет до того, чтобы снимать фильмы, когда он связался с Daft Punk в 1995 году, но он уже подтвердил свой талант на арене музыкальных видео. Для «Da Funk», первого коммерческого сингла Daft Punk, Джонез отказался от условностей в отношении музыкальных видеоклипов и просто использовал песню в качестве фоновой дорожки для короткометражного фильма о неуклюжем собачнике по имени Чарльз, который только что переехал в Нью-Йорк. Клип был одним из основных в ночных видеоклипах MTV в течение многих лет, и Daft Punk в конечном итоге выпустили собственное продолжение, в котором Чарльз представлялся успешным актером в Лос-Анджелесе.Несмотря на несколько попыток интеллектуализировать видео, группа всегда требовала, чтобы он не был настолько глубоким. Он просто странный собачник, который любит музыку и девушку по имени Беатрис.
Вокруг света Устанавливает тон
Что касается следующего сингла из своего дебютного альбома Homework , группа доверила свой видеоклип коллеге-французу Мишелю Гондри, который был наиболее известен своей работой с Бьорком. Группа и их механические альтер-эго не появляются, но клип начинает задавать тон эстетике, которую мы узнали.
The Robots Rise с
Discovery , но сначала займитесь аниме
Во время продвижения своего второго альбома Discovery , Daft Punk начали появляться в самой ранней форме своих фирменных масок роботов и заявили о несчастном случае в своей студии превратили их в машины. Даже несмотря на этот новый уровень единой анонимности, группа по-прежнему уклоняется от того, чтобы полностью вписаться в свои визуальные эффекты. Вместо этого они наняли Кадзухису Такенучи, чтобы снять Interstella 5555 , аниме-фильм, который послужил визуальным дополнением к альбому.Отдельных клипов на альбом не было.
Robots After All
До выхода альбома 2005 года Human After All группе хватило бы, чтобы полностью принять свой роботизированный облик как реальный образ вместо оправдания его отсутствия. Музыкальное видео на заглавный сингл «Robot Rock» было первым случаем, когда группа действительно появилась в качестве главных ролей в своем собственном музыкальном видео, хотя и по характеру. Хотя Human не является любимым альбомом почти любого фаната Daft Punk, сборник и соответствующий тур Alive укрепили визуальный образ группы через десять лет после их первого сингла.